
관습 트럭 에코에 도달하십시오




| 모델 | HC아르 자형10이자형 | HCR15E | HCR20E | |||||||
| 최대 부하 용량 | KG | 1000 | 1500 | 2000 | ||||||
| 로드 센터 | 큐 | mm | 500 | 500 | 500 | |||||
| 최대 리프팅 높이 | H3 | mm | 1600 | 1600 | 1600 | |||||
| 도달 길이 | E | mm | 570 | 570 | 570 | |||||
| 성능 | 기울기 각도 (위/다운) | DEG | 3/5 | 3/5 | 3/5 | |||||
| 여행 속도 (부하없이) | km/h | 5.2 | 5.2 | 5.2 | ||||||
| 여행 속도 (부하 포함) | km/h | 5.2 | 5.2 | 5.2 | ||||||
| 리프팅 속도 (부하없이) | mm/s | 115 | 115 | 115 | ||||||
| 리프팅 속도 (하중 포함) | mm/s | 92 | 92 | 92 | ||||||
| 낮은 속도 (부하없이) | mm/s | 173 | 173 | 173 | ||||||
| 낮은 속도 (부하 포함) | mm/s | 530 | 530 | 530 | ||||||
| 등급 (부하없이) | 비율 | 8 | 8 | 8 | ||||||
| 등급 성 (부하 포함) | 비율 | 5 | 5 | 5 | ||||||
| 서비스 중량 (배터리 포함) | kg | 2135 | 2385 | 2385 | ||||||
| 치수 | 포크 길이 및 마스트 도달 길이를 제외한 전체 프레임 길이 | 엘 | mm | 1880 | 1880 | 1880 | ||||
| 마스트 도달 길이를 제외한 포크 길이를 포함한 전체 길이 | G | mm | 2427 | 2427 | 2427 | |||||
| 마스트 도달 길이를 포함한 전체 길이 | G1 | mm | 2997 | 2997 | 2997 | |||||
| 프레임의 전체 너비 | 비 | mm | 1034 | 1034 | 1034 | |||||
| 마스트가 가장 낮을 때 전체 높이 | H1 | mm | 2200 | 2200 | 2200 | |||||
| 마스트가 가장 높게 들어 올렸을 때 전체 높이 | H4 | mm | 2636 | 2636 | 2636 | |||||
| 휠베이스 | 와이 | mm | 1551 | 1551 | 1551 | |||||
| 포크 크기 | mm | 1070*35*100 | 1070*35*100 | 1070*40*100 | ||||||
| 조정 가능한 범위는 외부 너비를 제공합니다 | R | mm | 210-700 | 210-700 | 210-700 | |||||
| 포크가 포크가 가장 낮은 상태로 낮아 졌을 때 | 에스 | mm | 60 | 60 | 65 | |||||
| 최소 지상 클리어런스 | mm | 55 | 55 | 55 | ||||||
| 직각 스태킹을위한 최소 통로의 이론적 폭 (1200x1000) | asts | mm | 2564 | 2564 | 2564 | |||||
| 최소 회전 반경 | WA | mm | 1903 | 1903 | 1903 | |||||
| 오버 헤드 가드 높이 | mm | 2185 | 2185 | 2185 | ||||||
| 타이어 | 앞 바퀴 | mm | 210*85 | 210*85 | 210*85 | |||||
| 드라이브 휠 | mm | 230*75 | 230*75 | 230*75 | ||||||
| 캐스터 휠 | mm | 130*55 | 130*55 | 130*55 | ||||||
| 휠 재료 | 폴리 우레탄 | |||||||||
| 전기 구성 요소 | 운전 모터 유형 | AC 시리즈 모터 | ||||||||
| 등급 출력 | KW | 2.2 | 2.2 | 2.2 | ||||||
| 호이스트 모터 유형 | DC 시리즈 모터 | |||||||||
| 등급 출력 | KW | 3 | 3 | 3 | ||||||
| 배터리 | 전압 | 다섯 | 24 | |||||||
| 용량 | 아 | 270 | 270 | 270 | ||||||
| 무게 | kg | 245 | 245 | 245 | ||||||
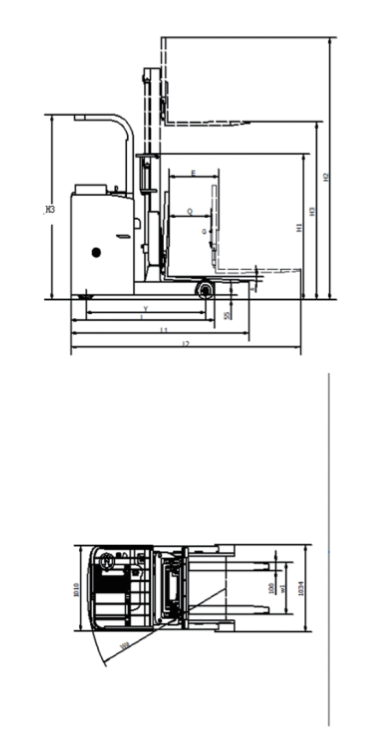
| 모델 | 리프트 높이 H3 (MM) | 무료 리프트 H2 (MM) | 마스트 높이 H1 (MM) | 포크 틸트 α/β (°) |
| 2000 | 1475 | 3036 | ||
| 2500 | 1725 | 3536 | ||
| 3000 | 1925 | 4036 | ||
| 3500 | 2225 | 4536 | ||
| 4000 | 2475 | 5036 | ||
| 4500 | 1848 | 5013 | 1361/1366 | |
| 5000 | 2015 | 5513 | 1527/1532 | |
| 5500 | 2238 | 6033 | 1701/1706 | |
| 6000 | 2398 | 6511 | 1859/1864 | |
| 6500 | 2577 | 7035 | 2035/2040 |
메시지 보내기







우리에 대해

Hecha Intelligent Equipment Co., Ltd.
Hecha Intelligent Equipment Co., Ltd. 저장성 자싱시에 위치하며 상하이에서 차로 1시간 거리에 있는 지리적 이점을 자랑합니다. 48,000m² 규모의 기업 부지에 현대적인 생산 시설과 장비를 갖추고 있습니다. 전문성을 핵심 경쟁력으로 삼고, 편의성, 지능화, 에너지 절약, 환경 보호 등 국제적인 현대 산업 및 물류 장비 트렌드를 따라가며 고객에게 고품질 물류 장비 솔루션, 지게차 부품 공급, 지게차 유지보수, 임대 등 다양한 서비스를 제공하는 지게차 제조업체로 거듭나기 위해 끊임없이 노력하고 있습니다.
Hecha Intelligent Equipment Co., Ltd. 중국이다 관습 트럭 에코에 도달하십시오 공급업체 그리고 OEM/ODM 트럭 에코에 도달하십시오 공급업체. 현재 회사에서 판매하는 주요 제품은 내연 기관식 카운터밸런스 포크리프트, 배터리식 카운터밸런스 포크리프트, 전기식 물류 취급 장비 등으로, 다양한 기능을 탑재하여 다양한 장소와 환경에서 고객의 적재, 적재, 하역 및 취급 요구를 충족할 수 있습니다.
이 회사의 제품은 ISO-9001 인증, 유럽 CE 인증, 그리고 중국 국가공정기계품질검사센터의 검사 인증서를 보유하고 있습니다. 9개의 상표와 79개의 특허를 보유하고 있어 기술력과 혁신 역량을 입증하고 있습니다.
당사는 국내외에 포괄적인 판매 네트워크를 보유하고 있으며, 중국 내 100개 이상의 판매 대리점과 해외 30개 이상의 판매 대리점을 보유하고 있습니다. 고객과 업계는 당사의 직접적이고 포괄적이며 효율적인 사전 판매, 판매 및 사후 서비스를 높이 평가하고 있습니다.
명예 증서





소식
-
배터리 구동 자재 취급으로의 전환 창고 및 유통 센터에서는 연소 장비를 꾸준히 연소 장비로 교체하고 있습니다. ...
더 읽어보기 -
디젤 동력이 여전히 대형 자재 취급을 지배하는 이유 야외 야드, 목재 저장소, 항만 및 건설 현장에서는 몇 시간의 연속 작...
더 읽어보기 -
산업용 파워트레인 역학: 엔지니어링 아키텍처 자재 취급 차량에 대한 최적의 전원을 선택하려면 파워트레인 엔지니어링 및 산업...
더 읽어보기 -
중장비 자재 취급의 최강자 산업 운영에는 끊임없는 힘, 구조적 무결성 및 장기적인 경제적 생존 가능성을 제공하는 자재 취급...
더 읽어보기 -
가동 시간 극대화: 디젤 지게차 파워트레인에 대한 기술 심층 분석 는 디젤 지게차 ...
더 읽어보기 -
산업 장비 소싱 가이드 소싱 기준, 차량 신뢰성 지표 및 현지 공급망 평가에 대한 기술 심층 분...
더 읽어보기
산업 지식
Reach Truck Eco의 조립 프로세스는 무엇입니까? 자동화 또는 반자동 조립 라인이 사용됩니까?
도달 트럭 에코의 조립 과정
1. 부품 준비 및 검사
의회 트럭에 도달하십시오 에코는 부품의 준비 및 검사로 시작합니다. Hecha는 모든 부품을 정시에 품질과 수량으로 공급할 수 있도록 완전한 공급망 관리 시스템을 가지고 있습니다. 부품이 공장에 들어간 후에는 모든 부품이 설계 요구 사항 및 ISO-9001 품질 표준을 충족하도록 보장하기 위해 차원 측정, 재료 구성 분석, 성능 테스트 등을 포함하여 엄격한 품질 검사를받습니다.
2. 프레임 어셈블리
프레임은 도달 트럭 에코의 핵심 구조이며, 조립 프로세스는 정확도와 안정성에 크게 의존합니다. Hecha는 레이저 용접 기계 및 로봇 용접 시스템과 같은 고급 용접 기술 및 자동화 장비를 사용하여 프레임 용접의 정확성과 강도를 보장합니다. 용접이 완료된 후 프레임은 X- 선 검사 및 초음파 검사를 거쳐 용접 품질에 결함이 없는지 확인합니다.
3. 전원 시스템 설치
의 전원 시스템 트럭에 도달하십시오 ECO에는 모델에 따라 내연 엔진 또는 배터리 팩이 포함될 수 있습니다. 내부 연소 엔진 지게차의 엔진을 설치할 때 엔진과 프레임 사이의 완벽한 일치를 보장하기 위해 엔진 제조업체의 어셈블리 지침을 엄격하게 따라야합니다. 배터리 지게차의 초점은 배터리 팩의 설치 및 고정 및 배터리 관리 시스템의 디버깅에 있습니다. Hecha는 고급 배터리 관리 시스템을 사용하여 배터리 팩의 안전한 작동 및 효율적인 충전 및 방전을 보장합니다.
4. 드라이브 및 스티어링 시스템의 조립
드라이브 및 스티어링 시스템의 어셈블리에는 기어 박스, 드라이브 휠 및 스티어링 휠과 같은 주요 구성 요소가 포함됩니다. Hecha는 각 구성 요소의 어셈블리 정확도 및 성능을 보장하기 위해 3 개의 좌표 측정 기계 및 동적 밸런싱 테스터와 같은 정확한 어셈블리 프로세스 및 테스트 장비를 사용합니다. 구동 모터 및 스티어링 모터의 디버깅도 핵심 단계입니다. Hecha에는 안정적이고 안정적인 모터 성능을 보장하기 위해 다양한 작업 조건에서 모터 작동을 시뮬레이션 할 수있는 전문적인 모터 테스트 플랫폼이 있습니다.
5. 제어 시스템의 설치 및 디버깅
제어 시스템에는 운전실, 작동 핸들, 디스플레이 화면 등이 포함됩니다. Hecha는 제어 시스템의 편안함과 편의성에주의를 기울이고 인체 공학적 설계를 채택하여 운전자가 쉽게 작동 할 수 있도록합니다. 어셈블리 프로세스 중에 모든 제어 구성 요소는 제어 정확도 및 응답 속도를 보장하기 위해 엄격한 테스트 및 교정을 거칩니다.
6. 전기 시스템의 설치 및 시운전
전기 시스템에는 배선 하네스, 컨트롤러, 센서 등이 포함되어 있으며 이는 도달 트럭 에코의 지능의 핵심입니다. Hecha는 버스 통신 및 PLC 제어와 같은 고급 전기 제어 기술을 채택하여 다양한 구성 요소 간의 정보 상호 작용 및 협업 작업을 실현합니다. 전기 시스템의 설치 및 시운전에는 높은 수준의 전문성과 정밀도가 필요합니다. Hecha는 전기 시스템의 안정성과 신뢰성을 보장하기 위해 전기 엔지니어로 구성된 전문가 팀을 보유하고 있습니다.
7. 기능 테스트 및 시운전
조립 후 Reach Truck Eco는 포괄적 인 기능 테스트 및 시운전을 겪게됩니다. 테스트 컨텐츠에는 스택, 로딩 및 언 로딩 및 핸들링과 같은 기본 기능뿐만 아니라 제동 성능, 스티어링 성능, 노이즈 제어 및 배출 제어와 같은 성능 지표가 포함되지만 이에 국한되지는 않습니다. Hecha에는 다양한 작업 조건과 환경을 시뮬레이션하여 지게차가 다양한 조건에서 안정적으로 작동 할 수 있도록 전문 테스트 사이트와 테스트 장비가 있습니다.
8. 품질 검사 및 인증
기능 테스트를 통과 한 후 Reach Truck Eco는 외관 검사, 성능 검사, 안전 검사 등을 포함한 최종 품질 검사를받습니다. 모든 검사는 ISO-9001 품질 표준 및 유럽 CE 인증 요구 사항을 충족합니다. Hecha의 제품은 또한 China National Engineering Machinery 품질 검사 센터의 검사 인증서를 보유하고있어 제품의 품질 및 안전 성능이 국제 최고의 수준에 도달 할 수 있도록합니다.
자동화 또는 반자동 조립 라인이 사용됩니까?
Hecha는 Reach Truck Eco의 조립 프로세스에서 자동 및 반자동 조립 라인을 널리 사용합니다. 프레임 용접, 부품 어셈블리, 전기 시스템의 설치 및 시운전에 이르기까지 고급 자동화 장비 및 로봇 시스템이 광범위하게 사용됩니다. 이는 조립 효율성과 정확성을 향상시킬뿐만 아니라 인건비와 안전 위험을 줄입니다. Hecha는 또한 자동화와 노동의 조합에 중점을 두어 인간의 지혜와 유연성에 대한 완전한 놀이를 제공하여 조립 프로세스의 유연성과 적응성을 보장합니다 .
<
문의하기
원하는 제품을 찾지 못하셨나요?
-
핸드폰
+86-19706105067
전화+86-0573-85856666
-
이메일
info@hechaglobal.com
-
추가하다
No.8 Dongxi Road, 탁구시, 중국 잔즈 지방

